komplikato:
Hát szerintem a Cyberdyne HAL 4 és 5 sokkal fejlettebb és használhatóbb. Viszont az izraeli techno... (2012.11.09. 19:52)Maraton robotlábon
Sanda gyanu:
Én azért kattintottam ide, mert azt hittem, hogy a Sony által 1999-ben gyártott Aibo robotkutyát l... (2012.11.05. 08:26)Hogyan építsünk kutyát?
Subribubi:
Nagyon szórakoztató videó.Durva, hogy milyen jó képzést kapnak a villamosmérnökök.Szerinted a Kand... (2012.04.17. 19:10)RobonAUT 2012
richard_szabo:
Valószínűleg nem olyan lesz, mint a filmekben, de szinte biztos, hogy sokkal többet el lehet érni,... (2012.04.17. 08:41)Robotis DARwIn-OP
Október végén a tartották 12 résztvevő csapattal a második autonóm robotversenyt a Marylandi Egyetemen, aholis egy kör alakú pályán kellett narancsszínű terelőbólyák között két kört minél gyorsabban megtenni.
Az alábbi videón a többek között a győztes is látható, elég meggyőző sebességgel.
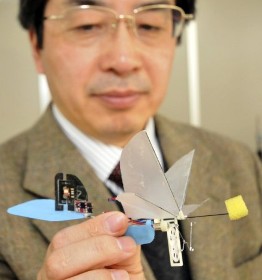
Index írta pár napja, hogy japán tudósok robotkolibrit mutattak be. Az összes híroldalon az alábbi egyetlen fénykép látható a projektről, az egyetem honlapján nem található semmi. Érdekes egy kétmillió dolláros projekt esetén ez a nagy titkolózás.
Nézzünk inkább egy másik hasonló robotot a DARPA szponzorálásban, melyről film is elérhető. Ezt az AeroVironment nevű cég fejleszti. Ez a robot valóban képes egy helyben lebegni a kolibri szárnymozgását utánozva. A megoldás előnyös lehet a légi megfigyelésben, ha néhány szenzort, elsősorban egy kis kamerát is sikerül a "madárra" illeszteni.
A mobil robotok navigációjának egyik alapvető kérdésköre, hogy hol van a robot és mi van körülötte. Ez egy tyúk-tojás probléma: ahhoz, hogy a robot tudja a helyét, ismernie kell környezetét, ahhoz, hogy megismerje környezetében a tárgyak hozzá viszonyított helyzetét, ismernie kell saját pozícióját. Ezt a két problémát egyben probálja megoldani a Simultaneous localization and mapping, azaz az egyidejű helyzetmeghatározás és térképezés. Erre a célra alkalmazott egyik módszer az általánosabb feladatokra is használható Kalman-szűrő, mely az aktuális pozíciót az elmozdulás alapján újraszámolja, majd a begyűjtött érzetek/mérések alapján pontosítja.
Az első videón látható, hogy a teremben körbemenő robot sztereo kamerát használ, méri a falak távolságát és ebből kiszámolja a mindenkori pozíciójának a valószínűségét, ami bizony nem egy konkrét pont, hanem több nagy valószínűségű hely összessége, ami az ábrán pirossal van jelölve. Ahogy halad előre ezek a piros pontok távolodhatnak egymástól, majd ahogy az újabb mérések megerősítenek egyes valószínűségeket, mások teljesen eltűnhetnek.
A következő videón a foglaltsági háló alapú felülnézeti térképen a robot saját mozgásából becsült pozíciója kékkel látható, ami elég hamar eltér a SLAM-mal javított valóditól (sárga szín).
Az utolsó videón mindez 3 dimenzióban látszik egy lézeres távolságmérőt használó robot esetében.
Visszatérés a mesterséges intelligencia gyökereihez, talán több sikerrel, mint az évtizedekkel ezelőtti próbálkozások. A Mind Machine projekt célja természetes értelemben vett intelligencia létrehozása, ahogy azt az MI indulásakor elképzelték, szemben a mai egy területre fókuszáló sikeres alkalmazásokkal, robotokkal.
A kutatás öt évig tart és négy fő területre koncentrál: tudat, test, memória, valamint agy és szándék. A kutatók között megtalálható Marvin Minsky, Newton Howard és Neil Gershenfeld. Utóbbi elmondása szerint 30 évet fognak visszatekerni és az akkor elakadt kutatásokat vizsgálják meg friss szemmel, és az utóbbi évtizedek eredményeinek ismeretében.